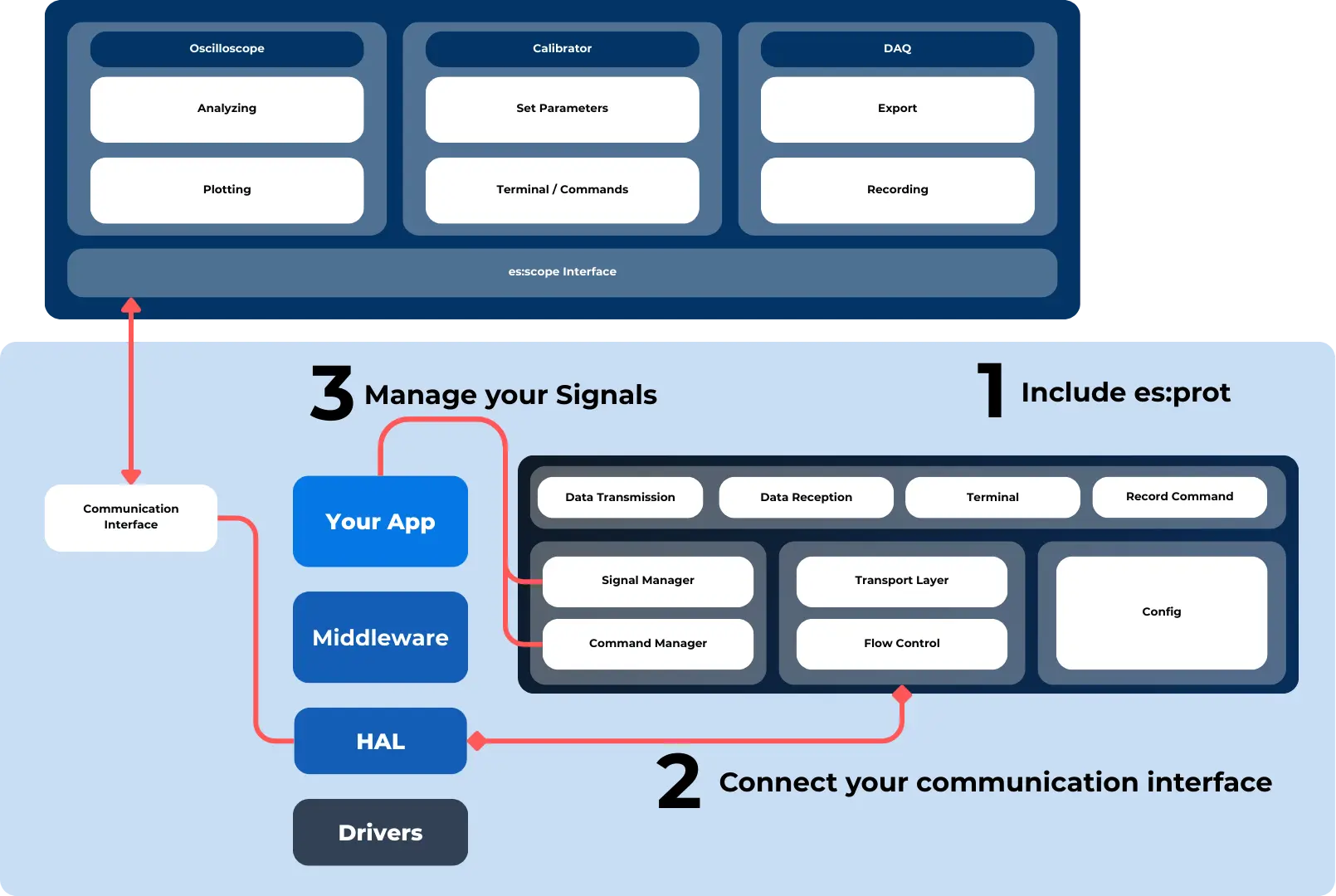
es:prot is a lightweight open-source C middleware that connects embedded firmware to the es:scope-Plattform.
It uses existing communication interfaces and provides minimally invasive runtime access to internal variables, signals, and commands.

es:prot was developed to specifically minimize configuration effort and runtime overhead in embedded systems.
Conventional approaches are often based on debug or trace access, ELF deployment, or intrusive tools. These can complicate integration, create additional dependencies, and influence runtime behavior. (Related white paper).
es:prot is a lightweight, open C/C++ middleware that integrates directly into the application. This enables DMA-based access to internal software states at runtime. The impact on system performance therefore remains minimal.
es:prot is used wherever insights into the runtime behavior of embedded systems are required without relying on debugger, trace, or ELF-based infrastructures.
It is particularly suitable for:
Debugging dynamic control loops
Validation of sensor and actuator behavior under real operating conditions
Correlation of internal software variables with external signals
Live adjustment of parameters during operation
It can be used both during development and on real hardware outside the lab.
es:prot pursues a software-first approach to runtime introspection in embedded systems.
Instead of relying on debug symbols, manufacturer-specific tools, or special measurement hardware, it integrates lightweight communication and data processing directly into the application.
This enables es:prot to offer a level of flexibility, portability, and scalability that cannot be achieved with traditional debugging and calibration approaches—regardless of hardware, interface, or toolchain.
Cost-optimized MCUs are often designed with just enough computing power for the target application. However, during development, additional high-bandwidth communication protocols can quickly exceed these limits.
To reduce the load on the target MCU, we offer optional protocol offloading adapters that can be integrated directly into existing development boards via an M.2 connector. These adapters handle high-bandwidth serial communication externally and enable the use of Ethernet or USB without burdening the target MCU.
This preserves the original hardware design, reduces integration costs, and speeds up development—especially in the early development and pre-production phases.
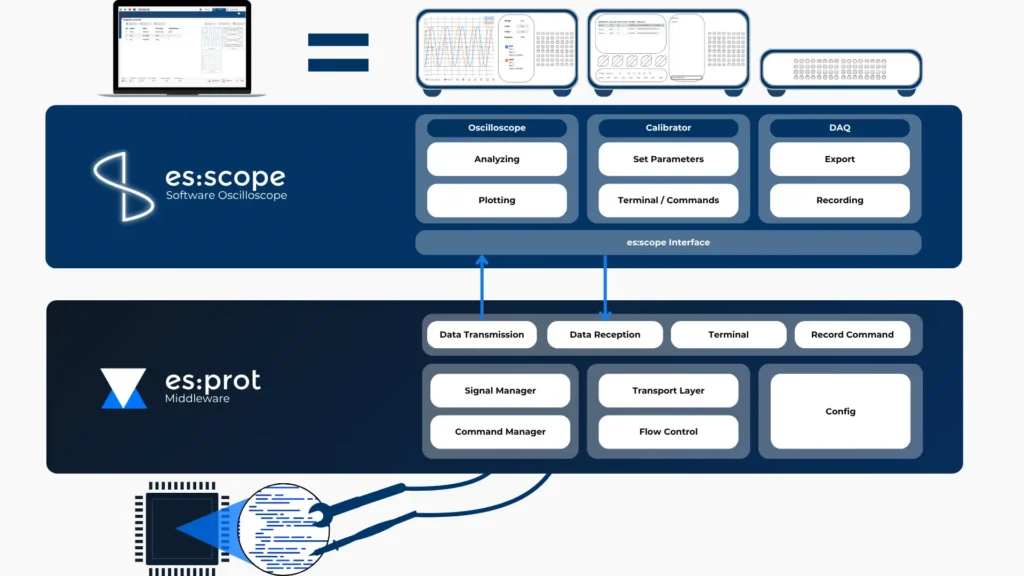
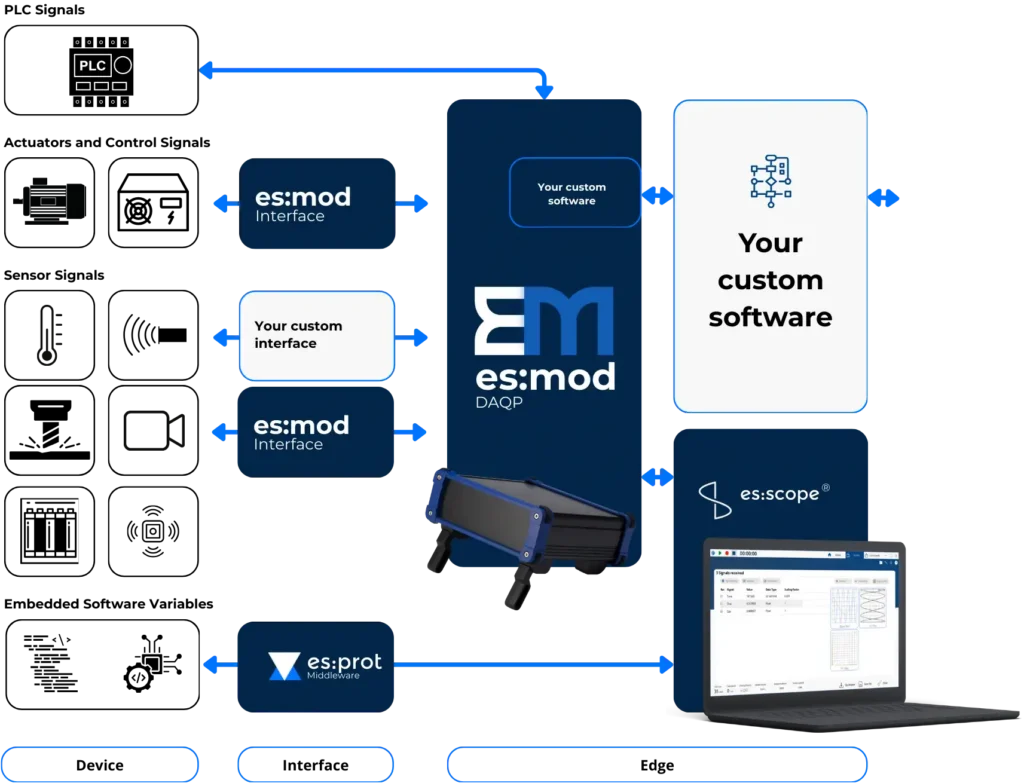
The es:saar platform connects actuators, sensors, embedded devices, and PLCs via a uniform, open toolchain.
es:mod captures and processes signals at the edge, es:prot handles data transport within the embedded software, and es:scope enables real-time visualization and coordination.
Each component can be used independently or replaced with your own hardware and software, enabling integration into existing toolchains while maintaining complete modularity and expandability.
We look forward to discussing your Embedded systems development. As a partner for corporations, SMEs, start-ups, and public research institutions, we support you at every stage.